工业机器人性能与控制!
2023-6-9新闻
「 1. 工业机器人系统组成及性能指标 」
1)工业机器人系统组成
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。一个典型的工业机器人如图1所示,工业机器人按照技术发展水平可以分为三代:第一代示教再现机器人、第二代感知机器人、第三代智能机器人。

图1 工业机器人系统结构组成
如图1所示,第一代工业机器人在外部结构上主要由三部分组成:操作机(或称机器人本体)、控制器和示教器。对于第二代及第三代工业机器人还包括感知系统和分析决策系统,它们分别由传感器及软件实现。
(1)操作机:用于完成各种作业任务的机械主体,主要包含机械臂、驱动装置、传动单元以及内部传感器等部分。
(2)控制器:是根据指令及传感器信息控制机器人本体完成一定动作的装置,是决定机器人功能和性能的关键部分,也是工业机器人更新和发展最快的部分。
(3)示教器:是机器人的人机交互接口,操作者可通过它对机器人进行编程或手动操纵机器人移动。
工业机器人从功能上由3大部分6个子系统组成。3大部分分别是机械部分、控制部分和传感部分。6个子系统分别是驱动系统、机械结构系统、人机交互系统、控制系统、感受系统、机器人与环境交互系统,其对应关系见图2。
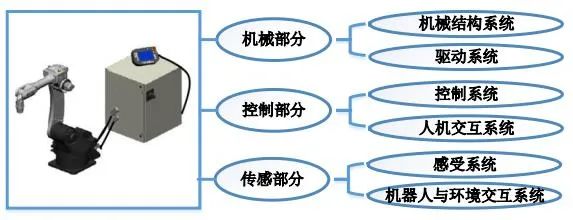
图2 工业机器人系统功能组成
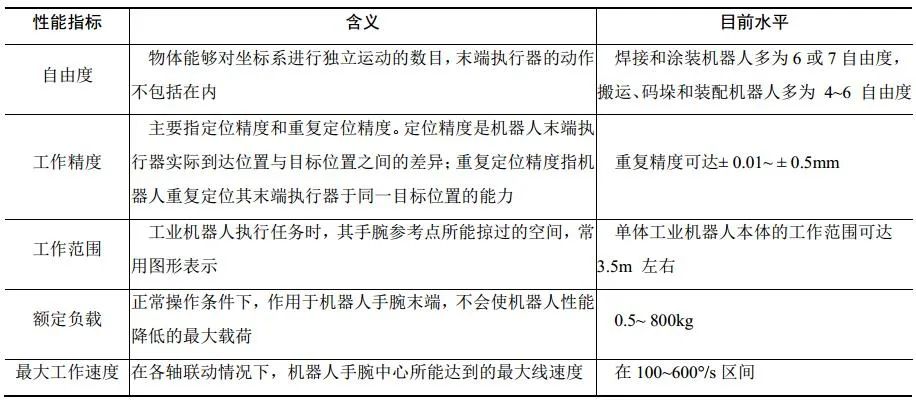
2)工业机器人性能指标
表1 工业机器人性能指标及含义
需要说明的是,机器人在工作范围内可能存在奇异点。奇异点是由于机器人结构的约束,导致关节失去某些特定方向的自由度的点。奇异点通常存在于作业空间的边缘,如奇异点连成一片,则称为“空穴”。机器人运动到奇异点附近时,由于自由度的逐步丧失,关节的姿态会急剧变化,这将导致驱动系统承受很大的负载而产生过载。因此,对于存在奇异点的机器人来说,其工作范围还需要除去奇异点和空穴。图3所示边缘不规则处即为除去部分。
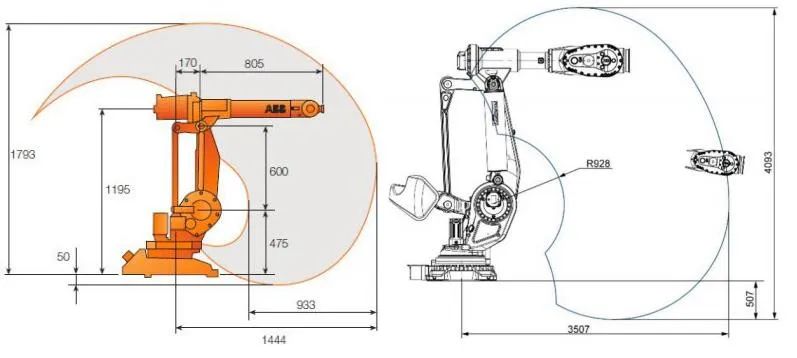
图3 ABB工业机器人IRB1410(左)和IRB8700(右)工作范围
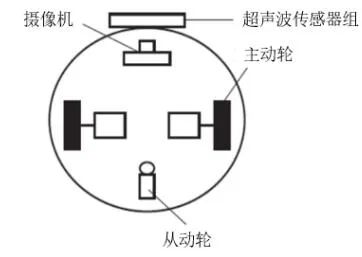
以图中所示移动机器人为例,摄像机安装在移动机器人的上方,获取障碍物的三维图像。超声波传感器组安装在移动机器人的前方(摄像机的正下方),获取障碍物与移动机器人之间的距离信息,如图4所示。