
读懂编码器的工作原理及增量型编码器
2020-9-24新闻
在现场的工业控制中,经常要使用到编码器。什么是编码器?它又是如何工作的呢?今天这篇文章我们就来聊聊编码器的工作原理并详细讨论下增量型编码器。
编码器,英文名称“encoder”,它是一种能把距离(直线位移)和角度(角位移)转换成电信号并输出的传感器。编码器通常用于工业的运动控制中,用于测量并反馈被测物体的位置和状态,如机床、机器人、电机反馈系统以及测量和控制设备等。
根据工作原理的不同,编码器可分为光电编码器(optical encoder)、磁性编码器(magnetic encoder)、电感式编码器(inductive encoder)和电容式编码(capacitive encoder)等等,使用最多的是光电编码器。
光电编码器(optical encoder)的组成包括:连接轴(Shaft),码盘(Code disk),光源(Light Source),输出电路(Output circuit)及外壳和连接法兰等,如下图:
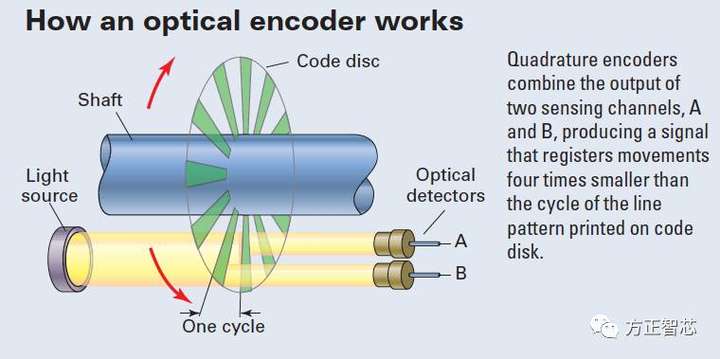
连接轴与码盘相连,并与被测物体相连,随着被测物体(如电机)的转动,码盘也跟着转动,通过码盘的光会发生明暗相间的变化,接收端的光敏元件会检测到这种变化,并转化成电信号进行输出。
根据码盘结构的不同,编码器又可以分为增量型编码器和绝对编码器,这篇文章我们主要讨论增量型编码器。
增量型编码器,英文名称“Incremental encoder”,它的码盘被分成大小相等的明暗相间的光栅,随着码盘的转动,接收端会检测到光的0和1的变化,并转换成电信号脉冲向外输出。通过对脉冲的计数,就能确定位移的大小,如下图:

为了区分正反转及检测零点,实际使用的码盘比上图要复杂些,通常包括三个部分:A相,B相和Z相,A相与B相相差1/4周期(相位差90度),可以用来区分正转还是反转;Z相为单圈脉冲,码盘转一圈产生一次,可以用作编码器的参考零位,如下图:
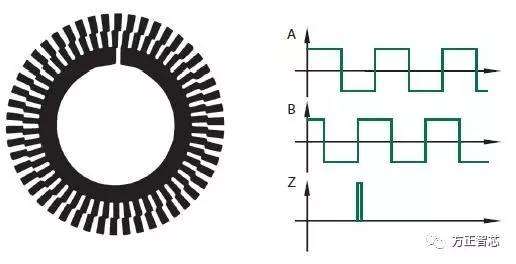
增量型编码器的输出波形如下图:
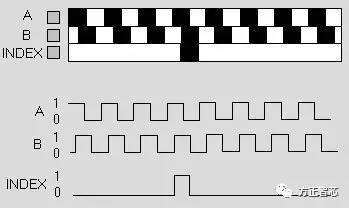
由于采用脉冲计数的方式,增量型编码器在测量前必须先寻找参考零位,因此它的测量结果是相对的。另外增量型编码器的数据断电后会丢失。
