
禾川SCARA机器人
2024-9-6新闻
SCARA机器人是一种应用于装配作业的机器人手臂,拥有三个旋转关节,常用于平面定位。作为一种常见的工业桌面式机器人,SCARA机器人具有高效、高精度、强可靠性的优点,因此被广泛应用于分拣、装配、搬运、检测等多种工业场景中。
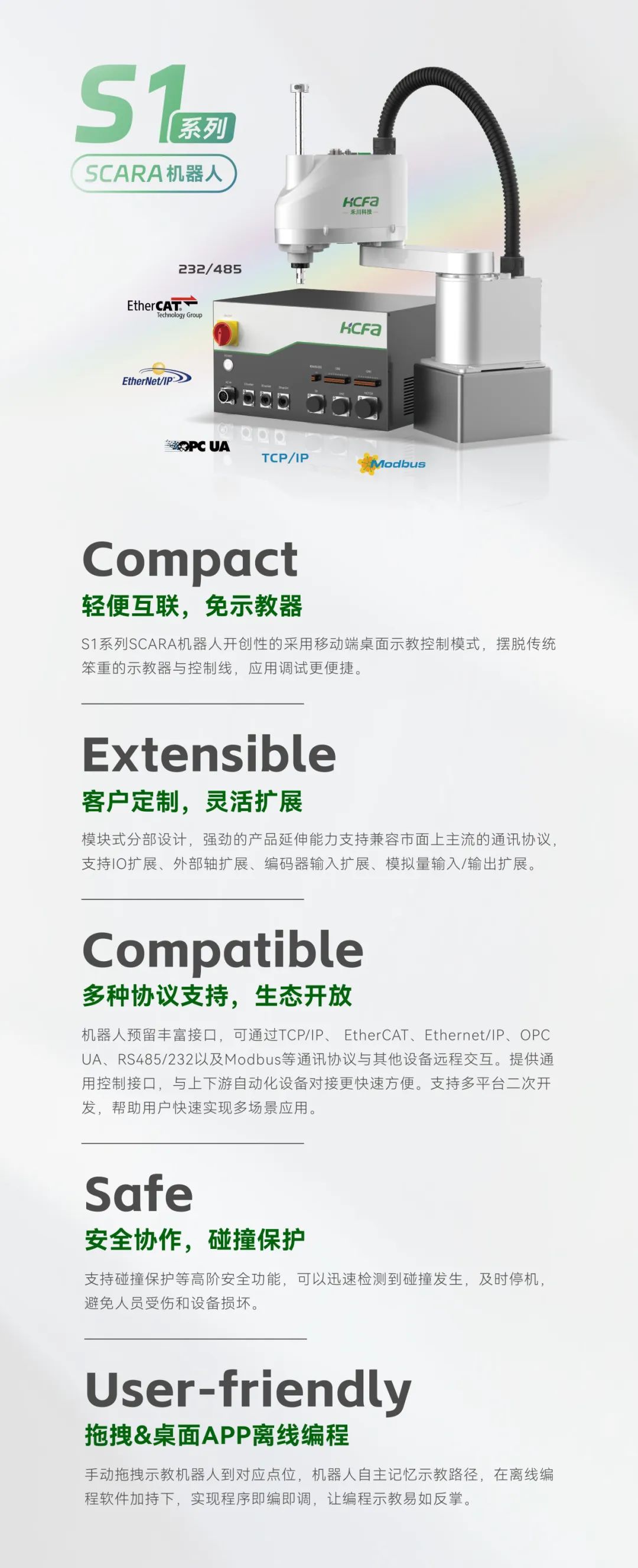
禾川S1系列SCARA机器人具有轻便互联、灵活扩展、多协议支持等多重优点,是用户在SCARA机器人中的不二之选。
“
解决方案应用案例
A
充电枪内芯自动装配设备
产品介绍
随着中国新能源汽车产业政策的推动和消费者环保意识的增强,新能源汽车市场迎来了爆发式增长,这也直接带动了充电桩基础设施建设的快速发展。充电桩作为新能源汽车能量补充的关键设备,其技术进步、分布密度以及使用便利性直接影响着新能源汽车的普及率和用户体验。
充电桩枪头内芯是充电桩与电动汽车进行电力传输的关键部件,它通过物理连接实现高压直流电的安全、高效传输。
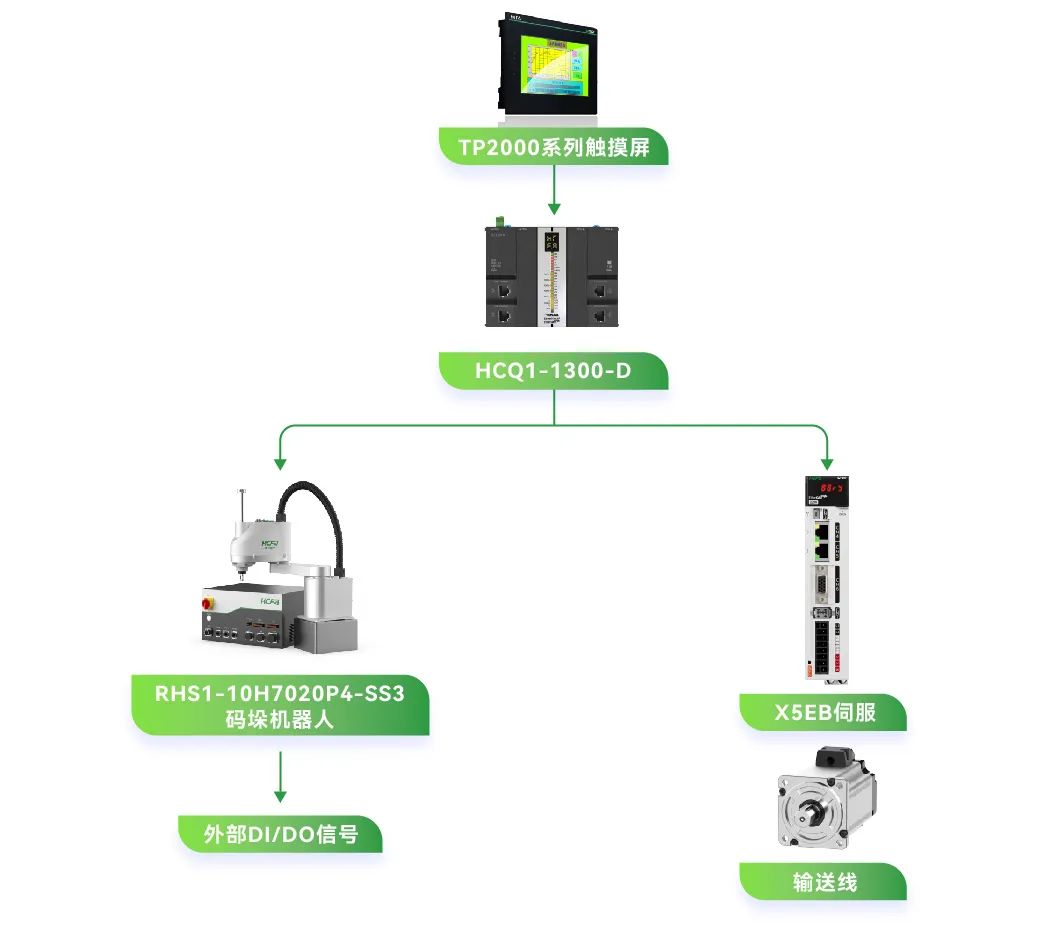
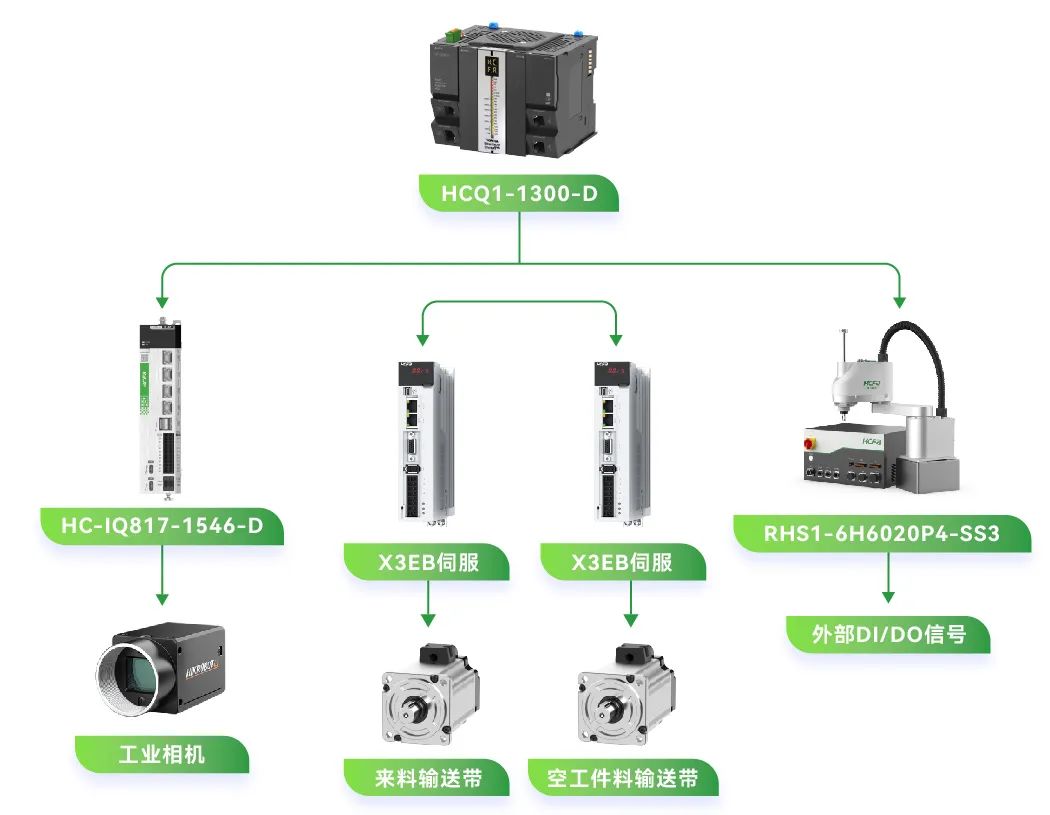
充电桩枪头内芯冲压设备

通过冲压机将铁芯与塑料件压合,压合完毕后由直线电机将物料输送至码垛工位。SCARA机器人将物料依次放置到左右两组码盘。
a1
禾川方案:
a2
性能指标:
a3
方案优势:
多工位机器人调度系统采用远程I/O技术,实现对外部设备的无缝对接,从而使设备能够直接指令机器人进行程序选项的选择、执行的启动与停止等关键操作。
机器人自带4点码垛工艺包,示教4个点位以及设置行数/列数机器人利用其内置的算法根据计算得出每个产品的精确位置,自动执行抓取和放置动作,完成整个码垛过程。此过程可以高度自动化,提高效率并减少人工错误。
通过EtherNet/IP协议与上级控制器进行通信,充分利用了该协议在速度方面的显著优势,实现项目中所有控制点的灵活配置与实时调整,其强大的数据传输能力能够高效地通过通信对机器人点位进行即时修改与优化,极大地增强了系统的响应速度与可操作性。禾川SCARA机器人自带多种通讯工艺包,能够满足不同平台之间交互通讯。
B
伺服驱动器组装搬运
产品介绍
禾川伺服驱动器在多个领域都有广泛的应用。在物流设备、包装设备、印刷设备、激光设备、机器人等领域取得用户高度认可。禾川伺服及电机实现全自动化生产,自动化生产能够减少人为因素造成的误差,提高产品的稳定性与一致性,从而在根本上提升良品率并降低成本,增强了企业的市场竞争力。此外,自动化生产还能根据市场需求灵活调整产能,快速响应市场变化,为客户提供更加可靠和高效的伺服解决方案。
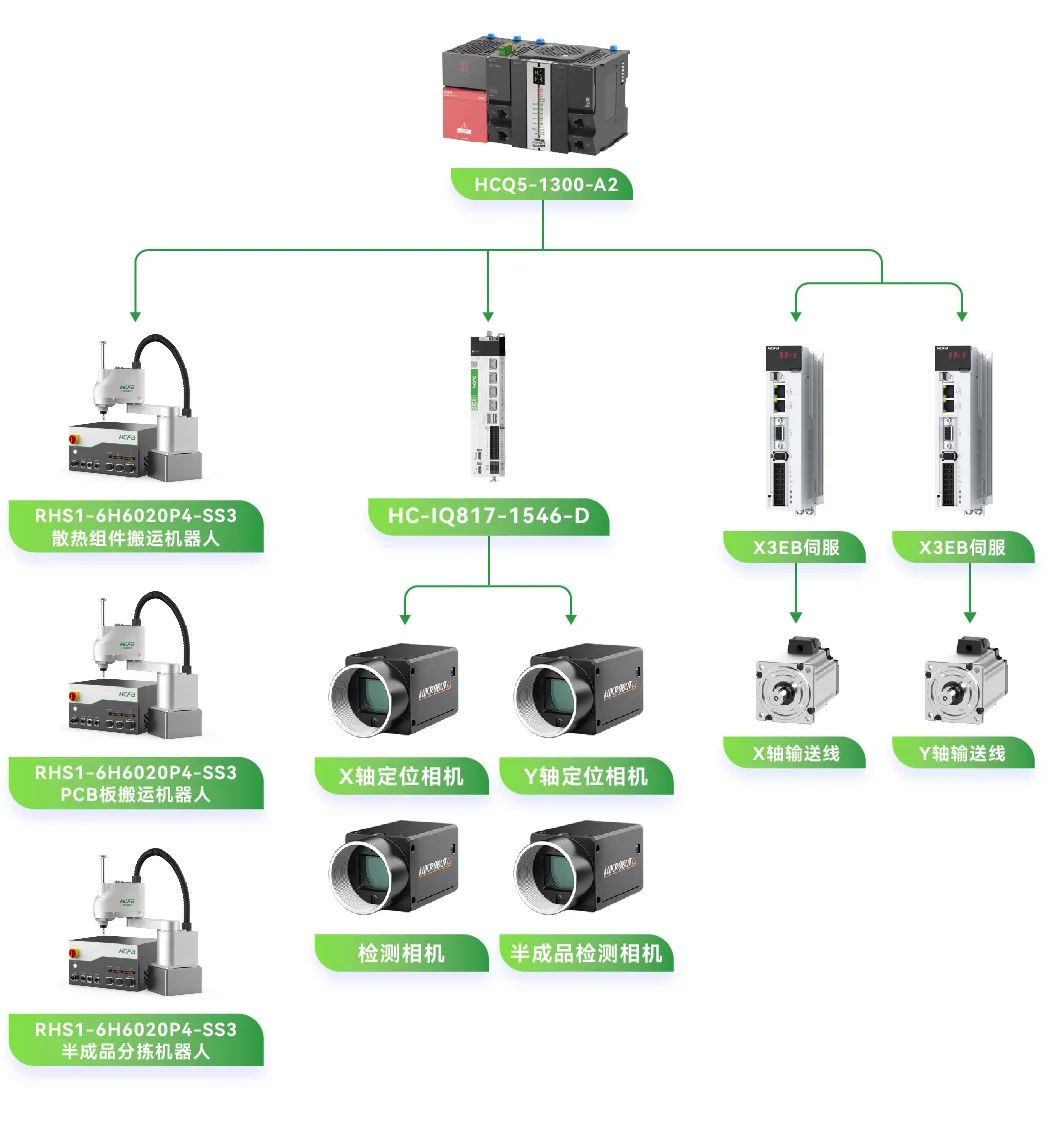
驱动器自动组装线
机器人抓取散热铝板、PCB板到指定工位,由机器人触发相机进行缺陷拍照检测,相机拍照定位对组装位置进行补偿,使散热铝板与PCB板贴合,随后进行二次拍照,实现分拣。
b1
禾川方案:
b2
性能指标:
b3
方案优势:
自带视觉工艺包,成熟的工艺包让用户可以更快地完成系统的部署和调整,从而缩短了从安装到正式运行的整个调试周期。无需从零开始编写复杂的视觉处理程序,通过简单的配置和参数调整即可完成设置。让用户设定参数来构建视觉检测流程,大大降低了使用门槛,使得非专业编程人员也能快速上手。
强大的多任务处理能力实现高效的控制和通讯,多核CPU同时处理多项任务,而不干扰主程序的运行进程,从而确保系统的稳定性和响应速度。
C
空开磁组件高速码垛应用
产品介绍
热磁式空气开关通过结合热元件和磁元件,实现了对电路的双重保护:热元件对持续过载情况进行响应,而磁元件则快速应对短路故障。这种设计既保证了电路在日常运行中的安全,又能有效应对突发的电气故障,是电气系统中不可或缺的安全保护装置。
磁组件(热组件)自动装配设备
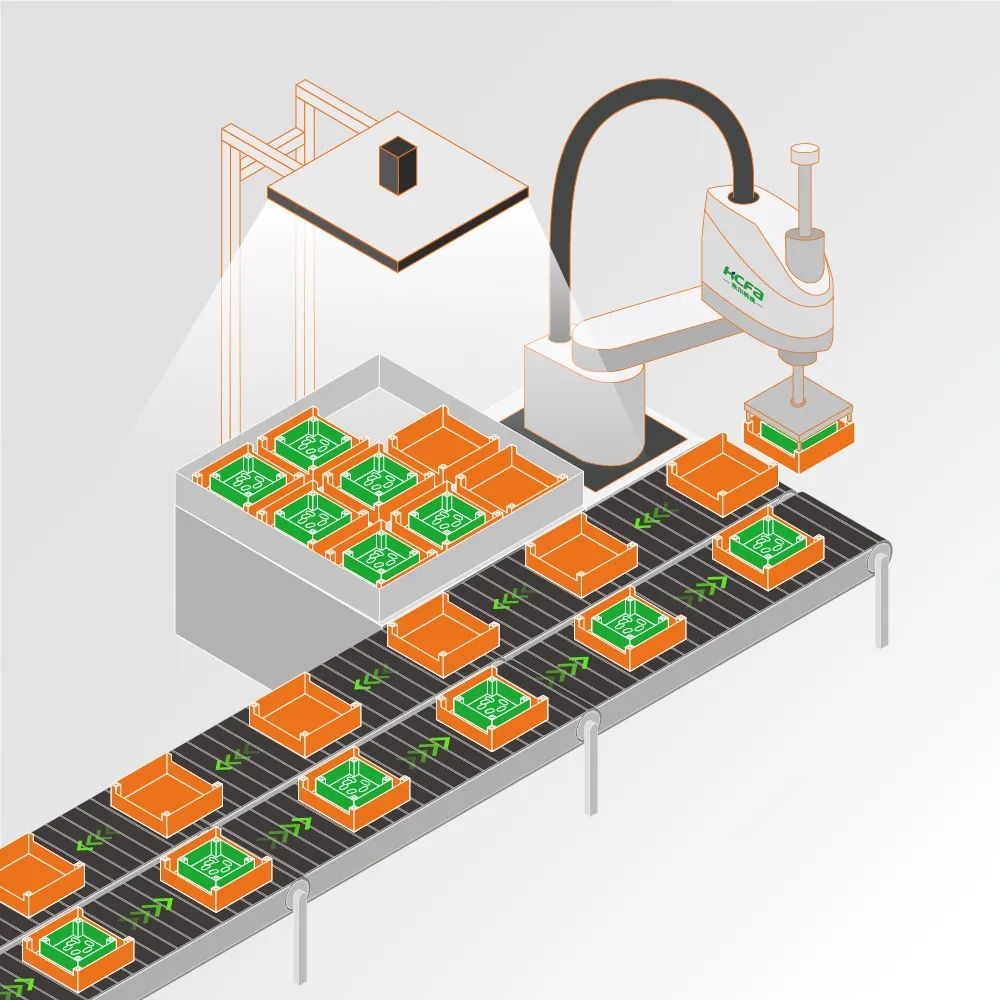
产品为空开中的热组件和磁组件,线体前端产品组装完成后流入后端检测工位,搭配相机进行外观检测,检测后由PLC发送产品状态位,机器人判断状态位抓取产品进行良品码垛或次品丢弃,最后抓取空盒回流前端,直至摆满整个码盘。
c1
禾川方案:
c2
性能指标:
c3
方案优势:
自带4点码垛工艺包,示教4个点位以及设置行数/列数机器人利用其内置的算法根据计算得出每个产品的精确位置,自动执行抓取和放置动作,完成整个码垛过程。此过程可以高度自动化,提高效率并减少人工错误。
支持拖动示教功能,不仅在操作上以及后续操作人员的维护上都大大降低了对技术人员的专业性要求,加强了操作员与机器人之间的直接互动,使得示教过程更加自然流畅,提升工作效率。
基于动力学模型,设计多种碰撞响应策略。不同于简单的碰撞停止动作,优化后的碰撞回退功能能够在检测到碰撞时,迅速且平稳地沿原路径后退,这种高阶碰撞保护机制尤为重要,它能有效降低工作场所事故风险,保障操作人员的安全。
